1. Basic Knowledge of Maths
多元函数的 $\text{Taylor}$ Expansion
但是一般来说, 我们展开到二次就完全足够:
where $\nabla f(\boldsymbol a)$ is the gradient of $f$ evaluated at $\boldsymbol x= \boldsymbol a$ and $\nabla ^2f(\boldsymbol a)$ is the Hessian matrix. 也就是说, 对于
有:
这里课件上的符号写的很随便. 我们假设这里的 $\nabla^2\not =\nabla\cdot \nabla=\Delta$ ($\text{Laplace}$ 算子), 而仅仅表示 $\text{Hessian}$ 矩阵
2. Gradient Descent
2.1. Principle
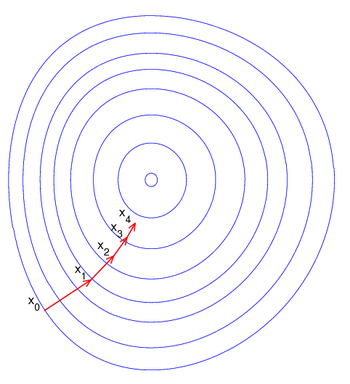
梯度下降法是典型的一阶优化算法. 梯度下降法的终极目标是: 如何在较少的次数下找出局部范围内偏导充分小的区域.
对于 $\boldsymbol x=\left\{x_1, x_2, \ldots,x_n\right\}\in \mathbb R$, 对于给定的初始点 $\boldsymbol x_0$ 以及定义在 $\mathbb R$ 上的函数 $f$, 我们定义梯度下降算法的过程如下:
其中, $\eta$ 叫做学习率 ($\eta>0$)
总的来说, 梯度下降法的过程包括四个部分:
- 目标函数定义
- 初始点选择
- 更新公式
- 结束机制
2.2. optimizations
我们发现上述的梯度下降法有失灵活性. 具体来说, 不管在函数的何种位置, 我们总是给予它相同程度的学习率. 历史上采取了多次优化
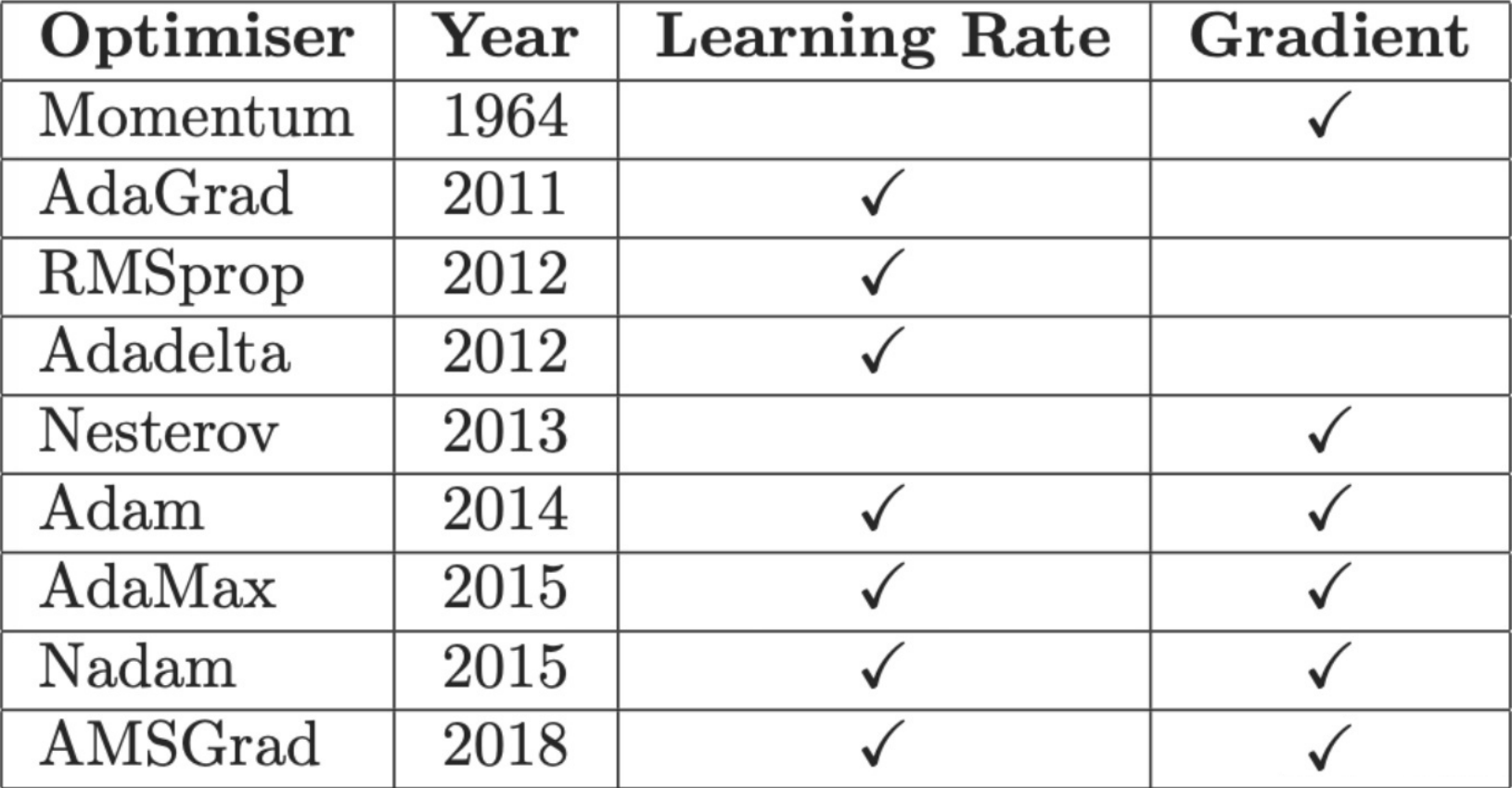
它们大致上可以分成如下的两类:
Learning Rate Schedulers (基于学习率的改进机制)
- 将学习率乘以一个常数或者时间因子, 使学习率能适应梯度. 当梯度值很大时, 希望更新小
Gradient Descent Optimizer (基于二阶梯度的改进机制)
- 将学习率乘以一个梯度的因子来进行调整
- 利用到之前的梯度来更好的指导梯度下降, 更近的梯度值获取更高的权重, 因而实现了exponential moving average
2.3. Representative Gradient Descent
Momentum
Nesterov Accelerated Gradient
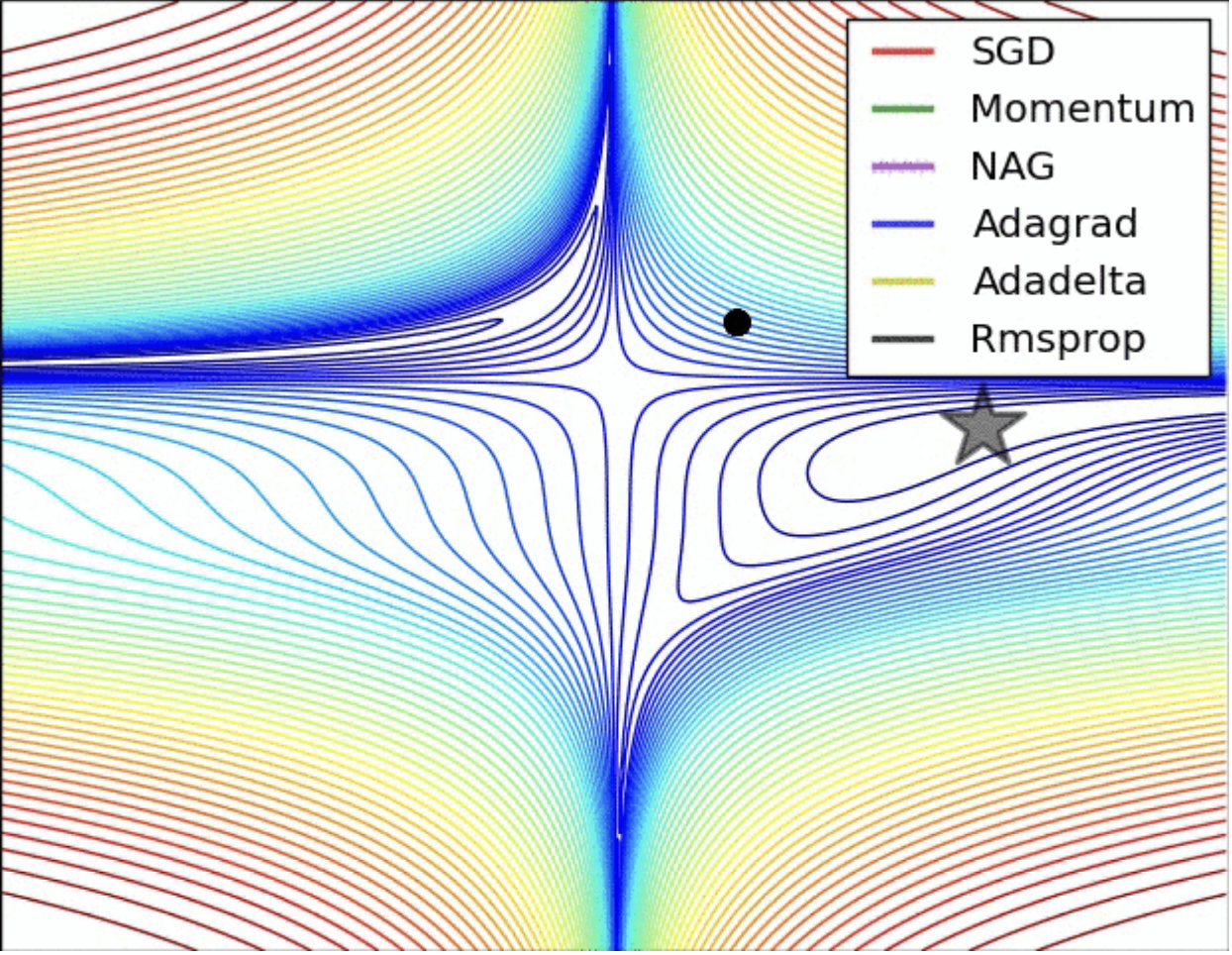
2.4. Limitations
梯度下降法被发现普遍存在下面的问题:
- 靠近极小值时收敛速度减慢
- 直线搜索时可能会产生一些问题
- 可能会“之字形”地下降
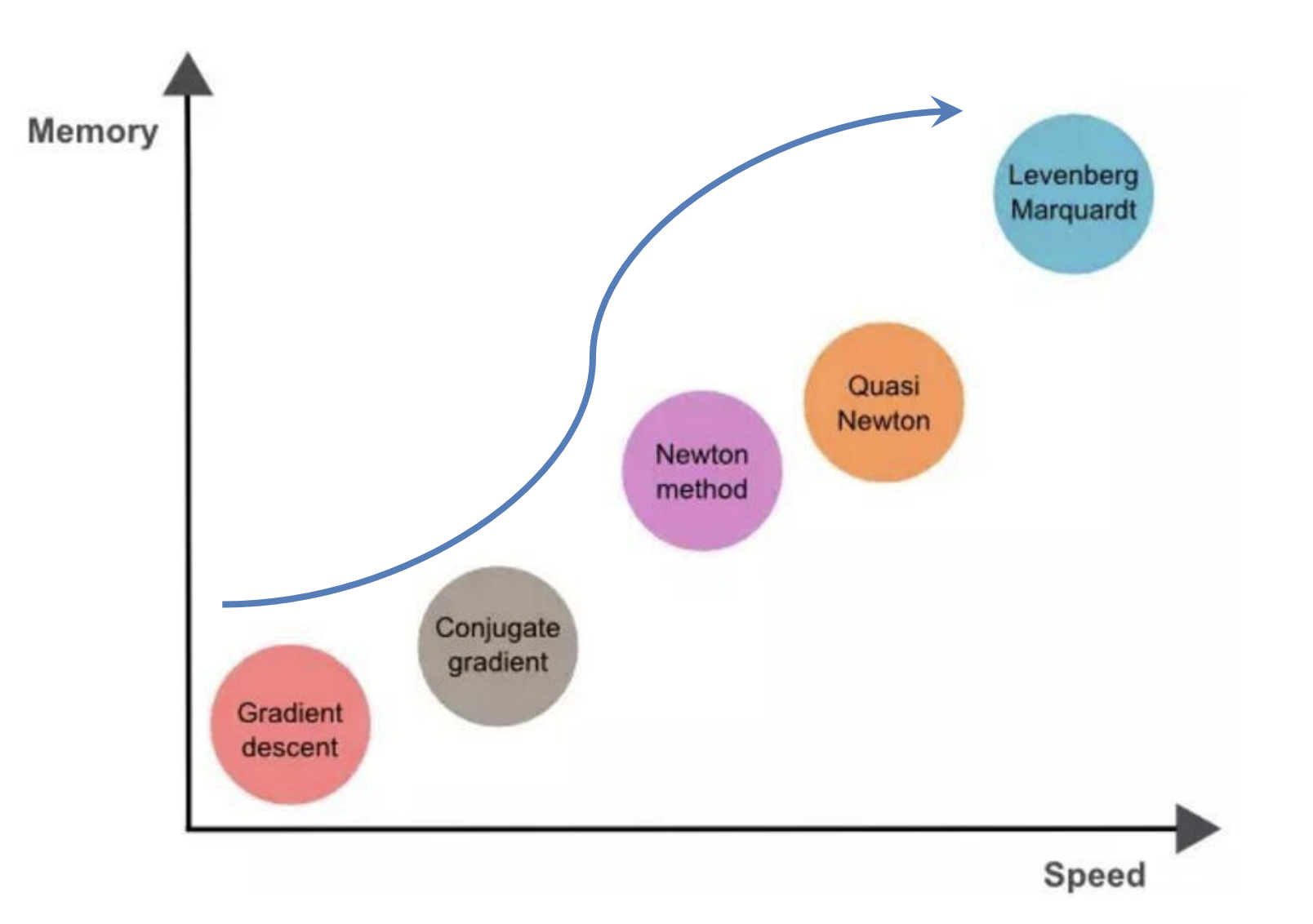
3. Newton’s Method
梯度下降法: 是一次平面去拟合当前点的局部曲面
牛顿法: 用二次曲面去拟合当前点的局部曲面
通常情况下: 二次曲面的拟合优于平面, 所以牛顿法选择的下降路径会更符合真实的最优下降路径.
3.1. Principle
Newton’s Method 同样是解决优化问题的方法. 一般来讲, 对于 $d\in\mathbb N$, $x\in\mathbb R^d$, 如果 $f$ 二次可微, 那我们忽略三阶及以上的高阶小量, 也就是注意到:
Newton’s Method 只不过令这里的 $\approx$ 变为 $=$, 并同时对 $\boldsymbol x$ 求偏导. 有:
最合适的 $\boldsymbol x_0$ 要能够使得 $\displaystyle \frac{\partial }{\partial \boldsymbol x_0}f(\boldsymbol x+\boldsymbol x_0)=0$, 也就是说
需要计算海森矩阵的逆,计算复杂度为$O(n^3)$
我们注意到这里的 $\boldsymbol x_0$ 是向量, 因此 $\boldsymbol x_0$ 实际上刻画了下一步迭代前进的大小和方向.
3.2. Steps
- 给定初始值 $\boldsymbol x_0$ 和精度阈值 $\varepsilon$, 并令 $k=0$
- 计算 $\|\nabla f\|$, 如果 $\|\nabla f\|\le\varepsilon$, 终止迭代; 否则 $\Delta\boldsymbol x_k=-(\nabla ^2f(\boldsymbol x_k))^{-1}{\nabla f(\boldsymbol x_k)}$
- 得到新的迭代点 $\boldsymbol x_{k+1}\leftarrow\boldsymbol x_k+\Delta \boldsymbol x_k$
- 令$k\leftarrow k+1$, 转到第二步
3.3. Improvements
我们发现 Newton’s Method 在精度和效率两方面都可以提升. 对应地, 下面两种方法分别提升了精度和效率
1. Damped Newton Method
对当前步长再做极小化优化.
考虑 $\lambda_{k}=\displaystyle \mathop{\operatorname {argmin}}\limits_{\lambda} f\left(\boldsymbol x_{k}+\lambda_{k} \Delta\boldsymbol x_0\right)$
- 给定初始值 $\boldsymbol x_0$ 和精度阈值 $\varepsilon$, 并令 $k=0$
- 计算 $\|\nabla f\|$, 如果 $\|\nabla f\|\le\varepsilon$, 终止迭代; 否则 $\Delta\boldsymbol x_k=-(\nabla ^2f(\boldsymbol x_k))^{-1}{\nabla f(\boldsymbol x_k)}$
- 计算 $\lambda_k$, 得到新的迭代点 $\boldsymbol x_{k+1}\leftarrow\boldsymbol x_k+\lambda_k\Delta \boldsymbol x_k$
- 令$k\leftarrow k+1$, 转到第二步
2. Quasi Newton Method
Newton’ s Method 每一步都需要求解目标函数的 $H$ 矩阵的逆矩阵, 计算比较复杂. 并且要求目标函数必须二阶可导, $H$ 阵须正定. 这些要求都是非常严苛的. 为此我们设计了 Quasi Newton Method
在拟牛顿法中, 我们用一个容易计算的矩阵 $\boldsymbol U$ 来模拟这个难以计算的 $\text{Hesse}$ 矩阵.
不同的拟牛顿法(DFP, BFGS, Broyden) 采用不同的计算方式
4. Conjugate Gradient
4.1. Principle
共轭梯度法是介于最速下降法与牛顿法之间的一个 方法, 它仅需利用一阶导数信息, 克服了最速下降法收敛慢的缺点, 又避免了牛顿法需要存储和计算 Hesse 矩阵并求逆的缺点.
在代数上, 两个向量 $\boldsymbol \alpha_i, \boldsymbol \alpha_j\in \mathbb R^d$ 共轭, 当且仅当存在半正定的 $A\in\mathbb R^{d\times d}$, 使得 $\boldsymbol \alpha_i^{\mathsf T} A\boldsymbol \alpha_j=0$. (这里的 $\boldsymbol \alpha_i, \boldsymbol \alpha_j$ 并不直接正交, 我们称它为 $A\text -$正交)
同样地,
假设 $\boldsymbol x_k$ 是局部线性的, 则 $A\boldsymbol x=\boldsymbol b$:
新的共轭方向的确定:
$\text{Fletcher-Reeves}$ 公式:
$\text{Polak-Ribiere}$ 公式:
4.2. Steps
-
计算一个初始的搜索方向 $\boldsymbol p_0$ (利用梯度下降法)
-
找一个使得目标函数 $f(\boldsymbol x_i +\alpha_i \boldsymbol p_i)$最小的 $\alpha_i$
-
计算 $\boldsymbol x_{i+1}= \boldsymbol x_{i}+\alpha_i\boldsymbol p_i$
-
确定下一个搜索方向 $\boldsymbol p_{i+1}=-\nabla f(\boldsymbol x_{i+1})+\beta_{i+1}\boldsymbol p_i$
- $\beta_{i+1}$ 由前一个迭代点梯度 $\nabla f(\boldsymbol x_i)$, 当前迭代点梯度 $\nabla f(x_{i+1})$ 共同决定
- 迭代完所有共轭方向
-
如不满足终止条件, 则回到第一步, 继续确定新的第一个梯度方向
5. Least Squares Method
假设 $\boldsymbol r\left(\boldsymbol x)=(r_1(\boldsymbol x),r_2(\boldsymbol x),\ldots,r_m(\boldsymbol x)\right)^{\mathsf T}$, $\boldsymbol J(\boldsymbol x)=\left[\displaystyle \frac{\partial r_j}{\partial x_i}\right]$, $j=1,2,\ldots,m;i=1,2,\ldots,n$.
最小二乘法的目标函数为
不难发现
to be continued…