1. MLP
1.1. BP Neural Network
Back Propagation (反向传播, BP) 神经网络指的是应用了误差反向传播 (Error Back Propagation)算法的多层感知机. BP本质是学习算法, 被广泛应用到MLP, ADE, KBF, DNN中. 因此很多时候, 又把 MLP 称为 BP 神经网络. BP 神经网络在实现上重点关注如下的四个概念.
$def.$ Error
在经典的感知器中, 误差 $E:=\displaystyle \sum_{i=1}^NE_i=\sum_{i=1}^N(y_i-\hat y_i)$.
对于多层感知机 (BP神经网络), 误差 $E:=\displaystyle \sum_{i=1}^N\frac 1 2(y_i-\hat y_i)^2$
这里的 $\displaystyle {1\over 2}$ 只是为了后续求导的便利, 本身没有特殊意图.
$def.$ Delta Rule
Delta Rule 刻画了人工神经网络的权重更新规则.
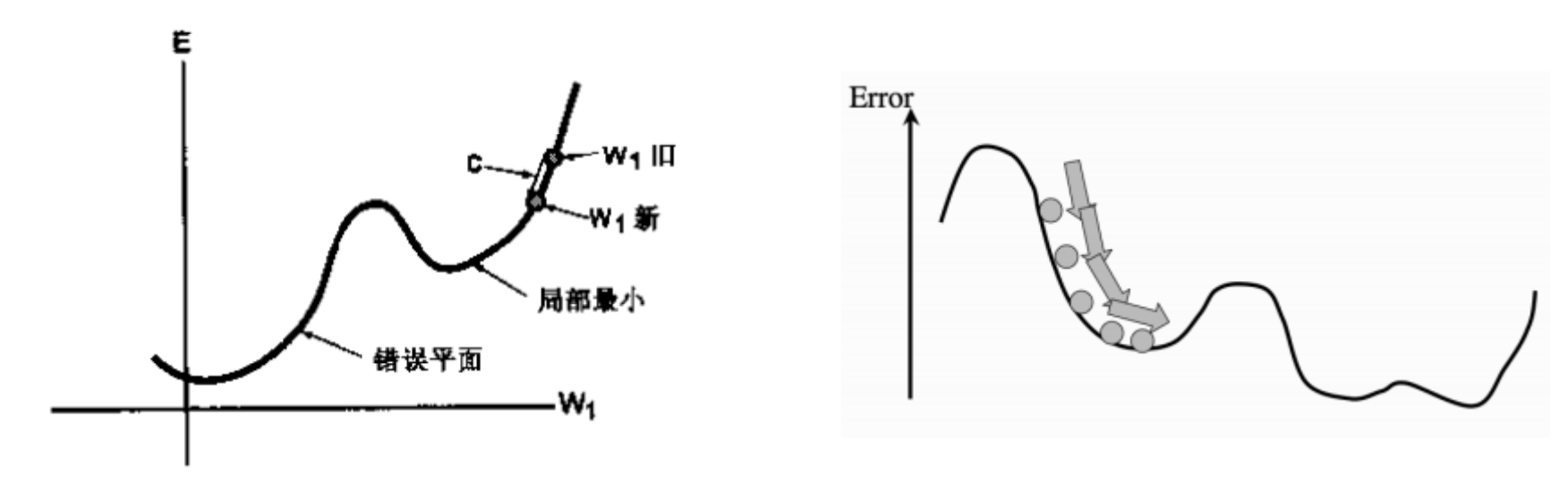
Delta Rule是基于误差平面的. 误差平面是神经网络所表示的函数在(训练)数据集上的累积误差. 每一个神经网络权值向量都对应误差平面中的一个点. 应用 Delta Rule 时, 激励函数必须是连续的和可微分的.
对于输入 $(\boldsymbol x,\boldsymbol y)$, 假设神经网络的输出为 $\hat {\boldsymbol y}$ , 误差为 $E$,
因为输出层中的节点的误差并不影响其他节点, 因此:
同时根据偏导数的定义, 我们有:
再代入到第二条等式中, 得到:
其中, 学习常数 $c$ 对 Delta Rule 的性能有很重要的影响, $c$ 决定了在一步学习过程中权值变化的快慢, $c$ 越大, 权值朝最优值移动的速度越快. 然而, $c$ 过大会越过最优值或在最优值附近振荡. 尽管 Delta Rule 本身不能克服单层神经网络的局限, 但是它的一般形式是 BP 的核心.
$def.$ Activation Function
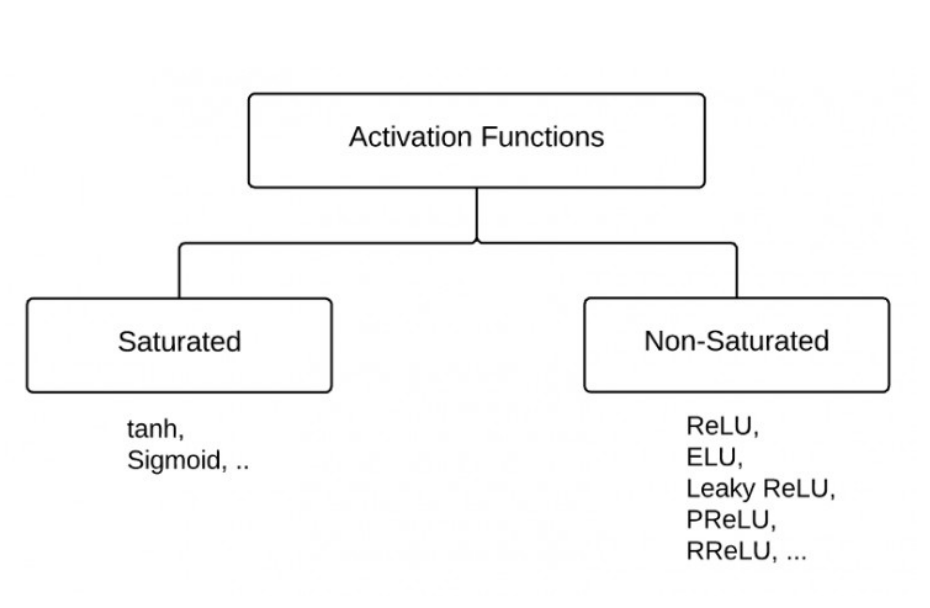
saturated activation function 指的是:
- 梯度消失
- 非以0为中心
- 指数计算代价大
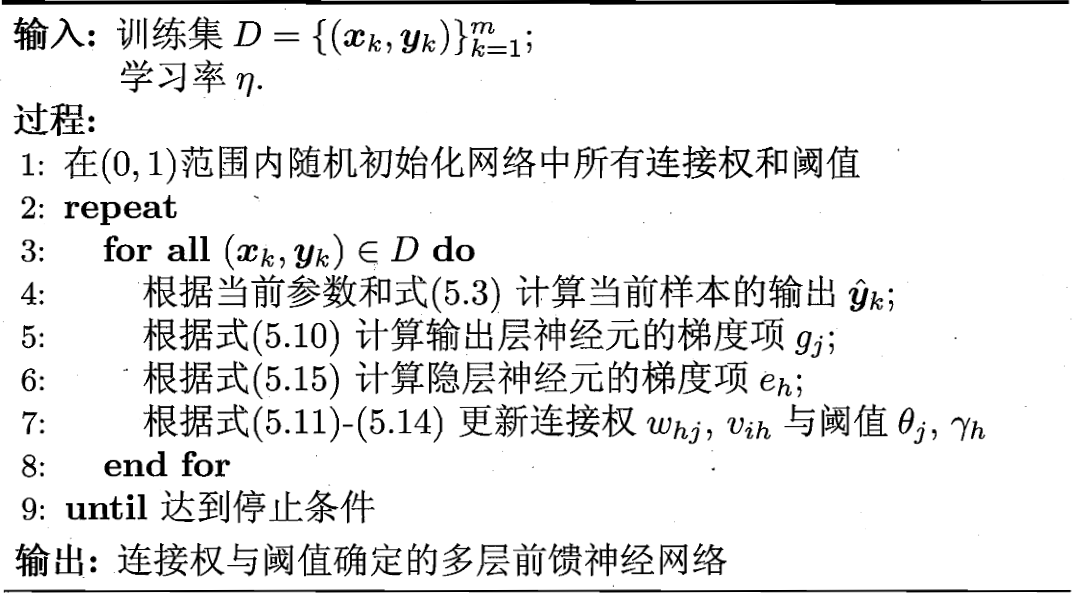
$def.$ BP Learning Process
总的来说, BP的学习过程包括如下的两个方面
-
前向阶段: 网络突触的权值固定, 输入信号在网络中正向一 层一层传播, 直到到达输出端, 获得网络的输出.
-
反向阶段: 通过比较网络的输出与期望输出, 产生一个误差信号. 误差信号通过网络反向一层一层传播, 在传播过程中对 网络突触的权值进行修正.
这里PPT上写的非常混乱, 于是直接看西瓜书了.
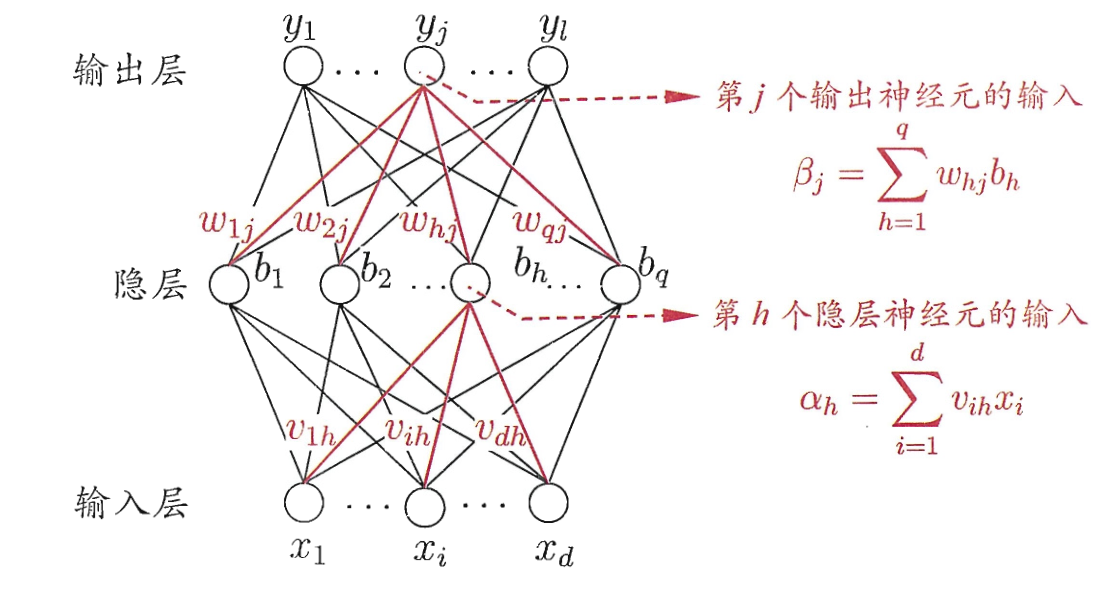
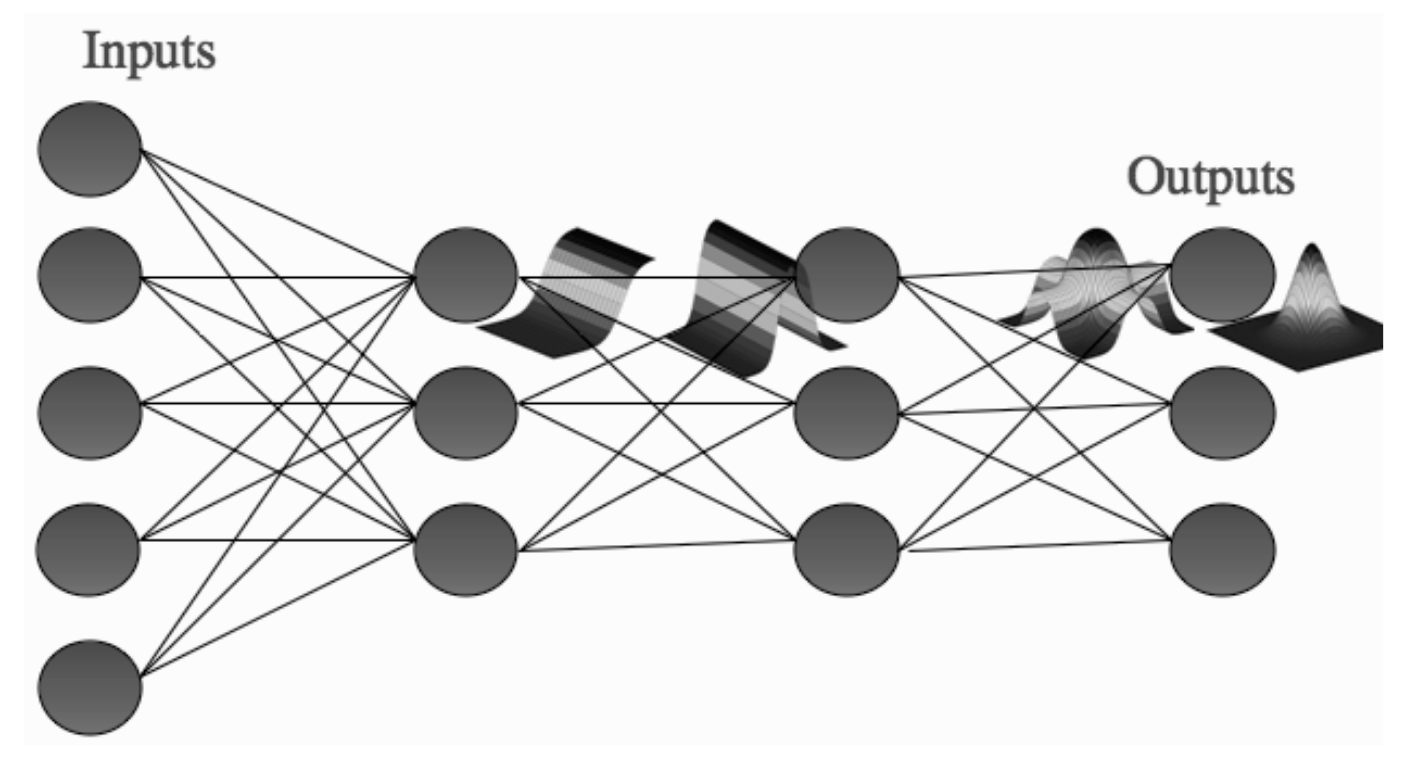
更加具体地说, 对于给定的训练集 $D=\left\{\left(\boldsymbol{x}_{1}, \boldsymbol{y}_{1}\right)\right. \left.\left(\boldsymbol{x}_{2}, \boldsymbol{y}_{2}\right), \ldots,\left(\boldsymbol{x}_{m}, \boldsymbol{y}_{m}\right)\right\}, \boldsymbol{x}_{i} \in \mathbb{R}^{d}, \boldsymbol{y}_{i} \in \mathbb{R}^{l}$, 也就是说有 $m$ 条数据, 每条数据刻画 $d$ 个属性和 $l$ 个输出. 如上图所示. 输出层第 $j$ 个神经元的阈值记作 $\theta_j$, 隐层第 $h$ 个神经元的阈值记作 $\gamma_h$, 输入层第 $i$ 个神经元与隐层第 $h$ 个神经元之间的连接权为 $v_{ih}$, 隐层第 $h$ 个神经元与输出层第 $j$ 个神经元的连接权为 $w_{hj}$. 对于训练集 $\left(\boldsymbol{x}_{k}, \boldsymbol{y}_{k}\right)$, 假设神经网络的输出为 $\hat{\boldsymbol{y}}_{k}=\left(\hat{y}_{1}^{k}, \hat{y}_{2}^{k}, \ldots, \hat{y}_{l}^{k}\right)$, 也就是说
根据上述的 Delta Rule, 我们发现 BP 算法基于梯度下降的策略, 也就是说对于网络在 $\left(\boldsymbol{x}_{k}, \boldsymbol{y}_{k}\right)$ 上的误差 $\displaystyle E_{k}=\frac{1}{2} \sum_{j=1}^{l}\left(\hat{y}_{j}^{k}-y_{j}^{k}\right)^{2}$ 以及给定的学习率 $\eta$, 有
我们从意义的角度展开这样的偏导
其中
并且 $f$ 作为 $\text{sigmoid}$ 函数具有这样trivial的性质
代入到上式中, 我们有
类似地也能推导出
其中:
1.2. Other Details
这里介绍 BP 实际上使用时的细节问题,
大概算是一种工艺问题
1. Original weight
很自然地, 我们会想随机选择初始权重, 也就是说对于 $\boldsymbol w=(w_1,w_2,\ldots,w_n)^{\mathsf T}$:
但根据方差的基本性质 (独立变量和的方差 = 独立变量方差的和) 我们发现在这样的情况下:
进一步导致激活函数饱和, 梯度趋近于0, 学习失效. 因此我们选取 $\boldsymbol w$ 满足
2. Activation Function
- 分类问题: $\text{sigmoid}$ 函数
- 回归问题: 一次函数
- $\text{Soft-max}$ 激活函数: $\displaystyle y_{\kappa}=g\left(h_{\kappa}\right)=\frac{\exp \left(h_{\kappa}\right)}{\displaystyle \sum_{k=1}^{N} \exp \left(h_{\kappa}\right)}$
- 其他深度学习中用的非饱和激活函数
3. Training Order
- 批量训练(梯度下降 gradient descent): 计算所有训练样本的误差和. 缺点: 计算代价大/收敛速度快/局部极小 (local minimum).
- 顺序训练: 按次序计算每个训练样本的误差. 不需要计算总误差, 快/局部极小/噪声敏感.
- 小批量训练(随机梯度下降 stochastic gradient descent): Mini-Batch $\to$ SGD. 适用于大规模数据.
这里的局部极小是一种很常见的问题. 形式化地, 如果对于 $\boldsymbol w^*$, $\theta^*$:
那么称 $(\boldsymbol w^*;\theta^*)$ 为局部极小解. 这一部分在优化与搜索中有更为详细的阐述.
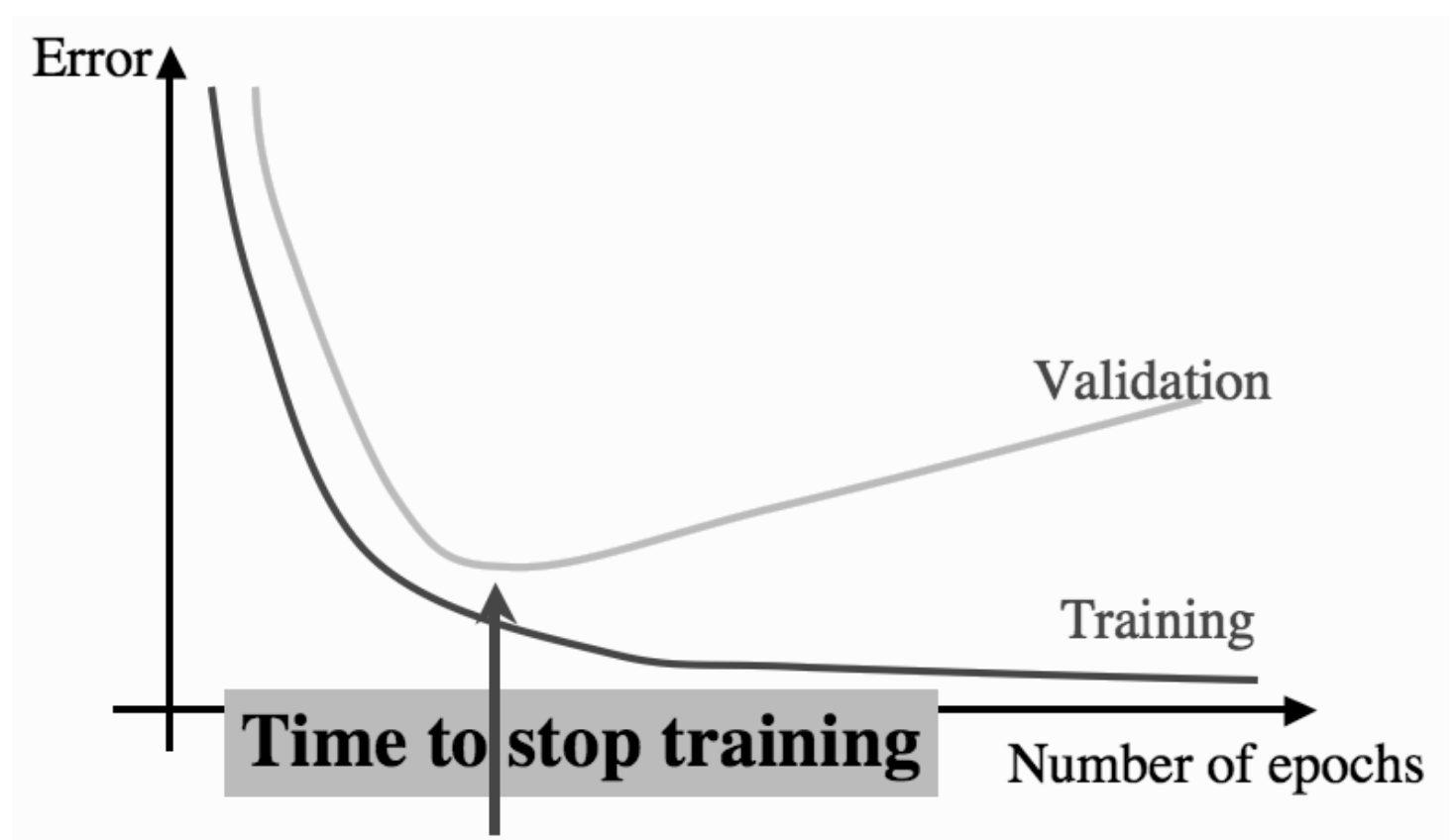
4. When to stop
防止过拟合.
- 设定固定迭代步数
- 设定误差小于某个固定阈值
- 以上两者的结合
2. Auto-Encoder
自动编码器是一种无监督的神经网络模型, 它可以学习到输入数据的隐含特征, 这称为编码(coding), 同时用学习到的新特征可以重构出原始输入数据, 称之为解码(decoding). 从直观上来看, 自动编码器可以用于特征降维, 类似主成分分析PCA, 但是其相比PCA其性能更强, 这是由于神经网络模型可以提取更有效的新特征. 除了进行特征降维, 自动编码器学习到的新特征可以送入有监督学习模型中, 所以自动编码器可以起到特征提取器的作用.
自编码器由编码器和解码器组成,二者可以被分别定义为变换 $\phi$ 和 $\psi$ 使得:
在最简单的情况下,给定一个隐藏层,自编码器的编码阶段接受输入 $\boldsymbol x\in \mathbb R^d =\mathcal X$ 并将其映射到${\boldsymbol z \in \mathbb {R} ^{p}={\mathcal {F}}}$
自编码器的解码阶段映射 $\boldsymbol z$ 到重构 $\boldsymbol x'$
自编码器被训练来最小化重建误差 (如平方误差):
3. Other Neural Networks
3.1. RBF
RBF (Radial Basis Function, 径向基函数) 网络 (Broomhead and Lowe,1988) 是一种单隐层前馈神经网络, 它使用径向基函数作为隐层神经元激活函数, 而输出层则是对隐层神经元输出的线性组合.假定输入为 $d$ 维向量 $\boldsymbol x$, 输出为实值, 则 RBF 网络可表示为:
其中 $q$ 为隐层神经元个数, $\boldsymbol c_i$ 和 $w_i$ 分别是第 $i$ 个隐层神经元所对应的中心和权重, $\rho (\boldsymbol x, c_i)$ 是径向基函数, 这是某种沿径向对称的标量函数, 通常定义为样本 $\boldsymbol x$ 到数据中心 $\boldsymbol x_i$ 之间欧氏距离的单调函数. 常用的高斯径向基函数形如
[Park and Sandberg, 1991] 证明,具有充分多隐层神经元的 RBF 网络能以任意精度逼近任意连续函数. 通常采用两步过程来训练RBF 网络:
- 第一步, 确定神经元中心 $\boldsymbol c_i$, 常用的方式包括随机采样、聚类等
- 第二步, 利用 BP 算法等来确定参数 $w_i$ 和 $\beta_i$.
我们发现形式上 RBF 与 Kernel SVM非常类似. 但实际上L
- SVM中的高斯核函数可以看作与每一个输入点的距离, 不太适应于大样本和大的特征数的情况
- RBF 神经网络对输入点做了一个聚类. RBF神经网络用高斯核函数时, 其数据中心 $\boldsymbol c_i$ 可以是训练样本中的抽样, 此时与 SVM 的高斯核函数是完全等价的.
3.2. ART
to-be-continued…